









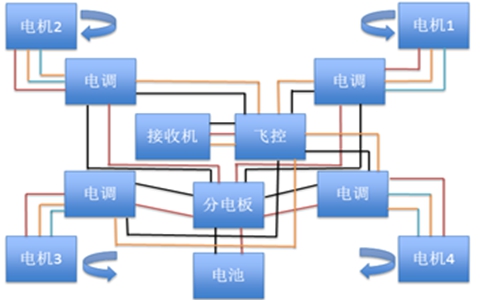
四旋翼的控制流程:控制中心单片机通过IMU陀螺仪加速度计(MPU6050等等)获取四旋翼的角度(俯仰、横滚和偏航)的相对基准角度变化、然后滤波(卡尔曼滤波等等)处理获得方向余弦矩阵和四元数得到欧拉角、使用PID控制或者PI,PD控制(P比例I积分D微分)将系统反馈值和期望值进行比较、并根据偏差不断修复、直至达到期望的预定值。
通过PID自动控制算法处理、输出期望的PWM波给四个电调、控制四个无刷电机的转速、从而得到一个期望的力控制四旋翼的前后左右上下飞行。

PID算法的含义:对四轴而言,PID算法是用来计算马达的动力大小,来抵消误差的。P的作用是加快系统达到预期的速度;I的作用是消除净差;D有阻尼的作用、就是阻止系统突变。
1、P直接和误差关联,比如四轴倾斜X度,P的调控效果=P*X个单位的力量。PID算法中,P是最主要最基本的参数。
2、I则和误差的积分有关。举个例子,如果写一个P控,控制一个电炉加热到400度,当前温度是室温,那刚开始误差=(设定温度-当前温度)很大,电炉就哗哗的加热上去了,但是到了390度,误差才10度了,加热功率变小了,可是呢,由于这个电炉会散热,结果单纯用P控,温度怎么也上不到400度。这时,I控就可以帮助适当调大一些功率,直到正好400度。那怎么实现的呢,用误差积分乘以I,如果老是温度不到400度,误差的积分就会越来越大,I调控的效果=I*误差的积分,也就越来越大。3、D和误差纠正的速度有关,D和P相比,就像汽车避震里的油压阻尼和弹簧,汽车弹簧碰到一个减速带,就会受压,反弹,此时如果没有阻尼,车子就会不停的上下振动。而油压阻尼则防止弹簧不停振动。因此D值越大,意味着阻尼越大,四轴不容易因为P而振动,但P的效果就会变差。D调控的效果=D*误差的微分。
4、把三个数值的调控效果加起来,就是总的调控效果





