









多旋翼无人机电力巡线
多旋翼无人飞行器在电力方面的应用首先是电力架线,以往进行电力架线,往往是在相隔几百米的山头,这几百米的距离需要架线人员跨越一个个障碍以极低的效率才能到达。利用多旋翼无人飞行器,以往可能需要一上午才能到达的山头现在可能在几分钟内即可完成,大大的提高电力架线的速度和效率。

多旋翼无人机的三种飞行模式
多旋翼飞行器系统一般提供三种飞行模式,它们操作的难易度从高到低分别是GPS模式、姿态模式和手动模式。 1、GPS模式,必须要有GPS系统模块,除了能自动保持飞行器姿态平稳外,还能具备精准定位的功能,在该种模式下,飞行器能实现定位悬停,自动返航降落等功能。 GPS模式也是目前多旋翼飞行器用的最多的飞行模式,它在大疆农业植保机MG-1遥控器上的代码是P。图2.22红点右上方的就是飞行模式三段开关,从下到上分别是M(手动模式)、A(姿态模式)、P(GPS模式)。

多旋翼无人机的链路系统
链路通讯系统主要用于多旋翼飞行器系统传输控制和载荷通讯的无线电链路,是飞行器与地面操纵人员之间沟通的桥梁。通讯链路的主要构成包括地面端与天空端。地面端需要将控制信号以及任务指令发到飞行器(天空端),飞行器则需将飞行器的状态以及任务设备的状态发送到地面端。

多旋翼无人机的控制系统
无人机地面站也称控制站,在规模较大的无人机系统中,可以有若干个控制站,这些不同功能的控制站通过通信设备连接起来,构成无人机地面站系统。以大疆的精灵飞行器为例,显示器不仅能够显示飞行器实时拍摄到的画面,还能够显示电量、飞行高度、飞行速度,地面的操作人员就可以根据画面与传输信息进行操纵,操纵的设备就是其手中的遥控器。

低温对锂电池放电的影响
环境温度对于飞行器的影响,主要是改变聚合物锂电池的充放电性能,锂聚合物电池属于化学电池,其充放电过程就是其内部进行化学反应的过程,低温将使电池的反应速率下降,从而造成续航时间、放电功率改变、电压骤降和飞行动力不足。下面是一款电池的不同温度下放电电压示意图,电池温度越低,起飞后电芯电压越低,待电池温度上升后,电压慢慢恢复正常。

磁罗盘的作用及使用注意事项
磁罗盘在多旋翼飞行器当中的作用也是一样的,负责为飞行器提供方位,也是属于飞行器的传感器。磁罗盘是飞行器正常飞行的前提,所以一定要关注指南针的状态,并根据操作要求及时对磁罗盘进行校正。地磁信号的特点是使用范围大,但是强度较低,甚至不到1高斯(电机里面的钕铁硼磁铁磁场可达几千高斯),所以其非常容易受到其他磁体的干扰。铁磁性的物资都会对磁罗盘产生干扰,例如大块金属、高压电线、信号发射站、磁矿、停车场、桥洞、带有地下钢筋的建筑等。如下图这样的大型钢结构厂房,其电磁信号比较复杂,在这样的位置飞行时需谨慎留意磁罗盘的运行状态。 另外,不同地区的地磁信号都会有细微差别,在南极北极地区,磁罗盘甚至无法正常使用。所以当使用多旋翼飞行器从一个地点进入到一个较远的地区时,应首先对磁罗盘进行校准,使其能够良好工作。手机与钥匙也都属于铁磁性物品,所以在进行磁罗盘校准时,应将手机、钥匙等铁磁性物品从身上取出再进行操作。

充电器的使用与维护
1、在一定范围内,充电倍率越大,电池可充进的电量会稍降低。例如同样一块2000mAh电池,使用1C充电可充进1800MAH,那使用2C充电可能无法充进1800mAh。 2、在充电时,应保证充电电流不应大于充电器最大输出电流。也就是电池的充电功率不应大于充电器的最大输出功率。 3、充电器在工作时会产生一定热量,应保持充电器散热通道畅通。 4、 在充电完毕后,应先结束充电在断开电池插头。 5、锂聚合物电池不应长时间大C数充电,在多次的大电流充电后应将电池进行一次低C数充电,以使电芯电压平衡。

无刷电机的尺寸以及功率
电机能够安全工作的最大功率,电机的功率反应了其对外的输出能力,功率越大的电机其输出能力也更强。关于功率的计算公式: 电压 X 电流 = 功率(W) 例如某2212电机,工作电压为11.1V,其最大工作电流为20A,可知其最大功率为: 11.1V X 20A = 222W 功率的单位是W,也就是瓦特。
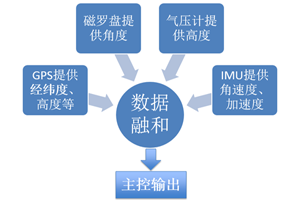
什么是组合导航控制
组合导航,是指将GPS、磁罗盘、气压计等系统中的一个或几个与IMU惯性测量单元集合在一起,形成的综合导航系统。大多数组合导航系统以惯导系统为主,其原因主要是由于惯性导航能够提供比较多的导航参数,还能够提供全姿态信息参数,这是其他导航系统所不能比拟的。但是,如果只有惯性测量单元,它会存在累计误差的问题,例如一部多旋翼飞行器在关闭GPS的情况下也能够正常飞行,但是它会一直进行漂移。这是因为它无法把自己确定在地球某一个确定的点,在没有这个明确的目标的前提下,飞行器只能是在保障自身平衡的情况下不断进行漂移。而如果是惯性测量单元加上GPS全球定位系统,飞行器能够明确自己所处的位置,一旦飞行器偏离这个位置,主控会发出指令要求其回到当前的地理位置。
什么是无刷电机
无刷直流电机简称为无刷电机,英文Brushless DC motor,简称BLDC,多旋翼无人飞行器常用的是三相无刷外转子电机。无刷电机是随着半导体电子技术发展而出现的新型机电一体化电机,它是现代电子技术、控制理论和电机技术相结合的产物。

什么是四轴六轴八轴
四旋翼是结构简单、飞行效率相对高效的一种常见多旋翼结构,也是目前市场上保有量最大的多旋翼飞行器类型。四旋翼玩具、小型航拍机一般都选用该结构。但是要注意的是,四旋翼没有动力冗余,任何一个电机出现问题停转,飞行器都将无法控制而摔机。

无刷电机的使用维护
1、避免无刷电机长期工作在高温环境 电机长期处于100摄氏度以上的高温环境,将对无刷电机的各个系统造成损伤。 (1)钕铁硼磁铁不耐高温,在接近其耐温极限时,将持续性的发生退磁,温度越高其退磁的速度也越快。退磁后电机磁性下降,扭矩下降,电机性能受到不可逆的损伤。 (2)轴承不可长期工作在高温环境,高温将使轴承内部润滑油发生挥发,并且滚珠因为高温发生形变,从而加速磨损。

无人机分类
如何区分飞行器? 自1903年莱特兄弟的飞机成功飞行,飞机的发展已经有百年的历史,在这百年内飞行器快速发展,飞机的机翼由两层三层发展到单层,飞机的动力由内燃机螺旋桨发展到涡喷,飞行的速度由每小时200公里左右发展到现在的接近每小时4000公里。同时,飞行器的类型也出现了多样的变化,在主流固定翼飞行器之外,直升机、旋翼机、飞艇也都在快速发展。下面,我们就常见的三种无人机飞行器类型分别进行介绍。

飞控系统
飞控系统又称飞行控制系统,通过高效的控制算法内核,能够精准地感应并计算出飞行器的飞行姿态等数据,再通过主控制单元实现精准定位悬停和自主平稳飞行。 在没有飞行控制系统的情况下,有很多的专业飞手经过长期艰苦的练习,也能控制飞行器非常平稳地飞行,但是,这个难度和要求特别高,同时需要非常丰富的实战经验。

RTK
RTK(Real - time kinematic)载波相位差分技术,常规的GPS测量方法,如静态、快速静态、动态测量都需要事后进行解算才能获得厘米级的精度,是实时处理两个测量站载波相位观测量的差分方法,将基准站采集的载波相位发给用户接收机,进行求差解算坐标。这是一种新的常用的GPS测量方法,以前的静态、快速静态、动态测量都需要事后进行解算才能获得厘米级的精度,而RTK是能够在野外实时得到厘米级定位精度的测量方法,它采用了载波相位动态实时差分方法,是GPS应用的重大里程碑,它的出现为工程放样、地形测图,各种控制测量带来了新曙光,极大地提高了外业作业效率。

飞控参数
四旋翼的控制流程:控制中心单片机通过IMU陀螺仪加速度计(MPU6050等等)获取四旋翼的角度(俯仰、横滚和偏航)的相对基准角度变化、然后滤波(卡尔曼滤波等等)处理获得方向余弦矩阵和四元数得到欧拉角、使用PID控制或者PI,PD控制(P比例I积分D微分)将系统反馈值和期望值进行比较、并根据偏差不断修复、直至达到期望的预定值。

飞行原理
多旋翼飞行器如何飞在天空中? 同普通电风扇原理相同,电机连接螺旋桨通过高速转动切割空气使其产生向下的气流,同时产生向上的升力,当升力大于飞行器本身的重力时,飞行器就可以实现上升的动作,反之下降;当升力等于于飞行器本身的重力时,则飞行器处于悬停状态。
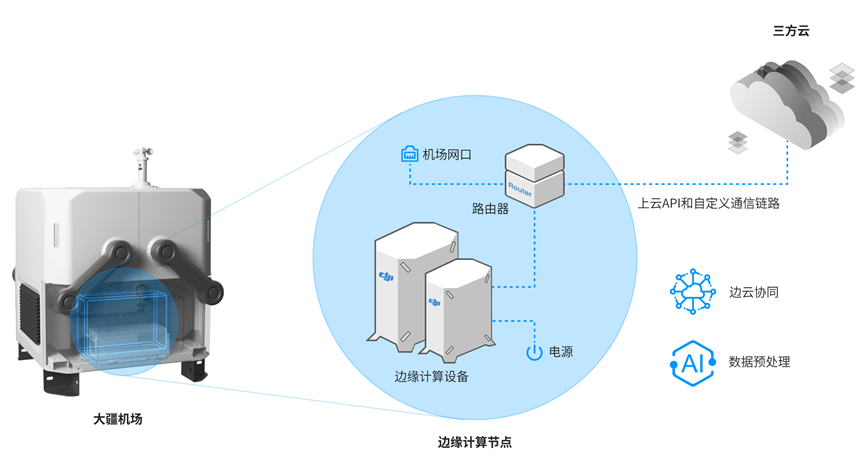
浅谈无人机管理平台的私有化部署和AI应用
浅入浅出聊聊机场私有化那些事
选择另一个国家或地区,以获得适用于你所在位置的内容和课程选项。
United StatesEnglish
- 中国大陆简体中文
- 香港(繁体)繁体中文
- 澳门(繁体)繁体中文
- 台湾(繁体)繁体中文
- AustraliaEnglish
- BrazilEnglish
- ChileEnglish
- ColombiaEnglish
- CroatiaEnglish
- FranceEnglish
- GermanyEnglish
- GreeceEnglish
- IndonesiaEnglish
- ItalyEnglish
- KazakhstanEnglish
- MalaysiaEnglish
- MexicoEnglish
- Other Regions (EXC. Europe)English
- PakistanEnglish
- ParaguayEnglish
- PeruEnglish
- PhilippinesEnglish
- PortugalEnglish
- SpainEnglish
- ThailandEnglish
- TurkeyEnglish
- United Arab EmiratesEnglish
- United StatesEnglish
- VietnamEnglish
- 대한민국대한민국

国家/地区:中国大陆
- 中国大陆简体中文
- 香港(繁体)繁体中文
- 澳门(繁体)繁体中文
- 台湾(繁体)繁体中文
- AustraliaEnglish
- BrazilEnglish
- ChileEnglish
- ColombiaEnglish
- CroatiaEnglish
- FranceEnglish
- GermanyEnglish
- GreeceEnglish
- IndonesiaEnglish
- ItalyEnglish
- KazakhstanEnglish
- MalaysiaEnglish
- MexicoEnglish
- Other Regions (EXC. Europe)English
- PakistanEnglish
- ParaguayEnglish
- PeruEnglish
- PhilippinesEnglish
- PortugalEnglish
- SpainEnglish
- ThailandEnglish
- TurkeyEnglish
- United Arab EmiratesEnglish
- United StatesEnglish
- VietnamEnglish
- 대한민국대한민국
LEARN MORE