









多旋翼无人机螺旋桨的主要参数
螺旋桨的主要参数包括长度、螺距,一款螺旋桨的命名也是根据这两个因素进行命名的,例如MG-1所用的21*7螺旋桨,即表示其长度为21英寸,螺距为7。另外,螺旋桨的动平衡是否良好也是其性能重要指标之一。 目前螺旋桨的长度主要包括英寸以及厘米,英寸更为常用,一英寸为2.54厘米。因为飞行器最先是由西方发展而来,所以在长度单位还遗留了之前的习惯。在同样的转速下,螺旋桨的长度越大其负载也越大,对电机的功率要求也越大。
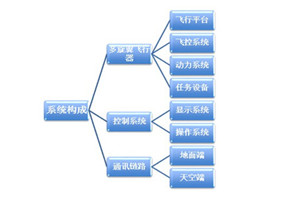
多旋翼无人机系统构成
多旋翼无人飞行器系统主要由飞行器平台(机架)、飞控系统、动力系统、任务设备、显示系统、控制系统、通讯链路天空端、通讯链路地面端共同构成。 飞行器平台也就是指整个机身,它提供了飞行器的基本框架,装载各种设备、电池乃至其他机身配件。动力系统则由电机、电子调速器、螺旋桨、电池、充电器共同构成,为整个飞行器提供飞行的动力,其中充电器属于地面设备。任务设备则是多旋翼无人飞行器实施具体功能的载体,在不同作用的飞行器上其任务设备也明显不同。

多旋翼无人机植保作业的优势
农业植保机已经广泛应用在农作物植保,同时,可利用无人机进行低空农田信息采集,可以准确清晰地获得农田信息,实现精准农业。利用多旋翼农业植保无人机进行植保作业具有以下几个特点。 多旋翼农业植保机操纵简单,起降方便,不需要专门的起降场地。以大疆创新的农业植保机MG-1为例,该机型适龄普通人经过一周左右的培训基本就可进行操作,实际操作时飞手只需进行起飞与降落,在进入智能作业模式之后只需对飞行器进行观察即可。
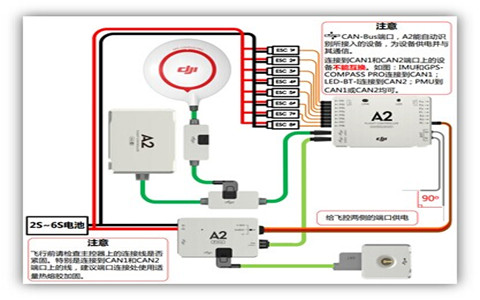
飞控系统的连接
整个系统的连接,我们以大疆创新的A2飞控为例,IMU以及GPS整合汇入主控;PMU一侧连接主电源,一侧连接主控对飞控进行供电;所有的电调接入主控,电调另外一侧接电机,主控通过对电调的控制进而对整个动力系统进行控制;LED由PMU进行供电。如下图所示. 主控是整个飞行控制系统的核心,通过它将IMU、GPS指南针、遥控接收机等设备接入飞行控制系统从而实现飞行器的所有功能。除了辅助飞行控制以外,某些主控器还具备记录飞行数据的黑匣子功能,比如:DJI的Ace One。主控单元还能通过USB接口,进行飞行参数的调节和系统的固件升级。
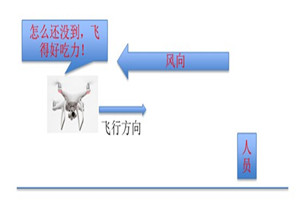
风向对无人机操作的影响
风向从来都是飞行器飞行的重要影响因素,逆风飞行将降低飞行器的飞行速度,而顺风飞行恰恰相反。有较大的侧风则会对飞行器的降落造成降落困难或者侧翻,降落时应注意风的方向。 另外,在风速较大时,应尽量避免飞到下风向较远距离,这是因为如果风速过快,飞行器返回起飞点的过程将全程逆风,有可能导致飞行器返回困难或者电量耗尽仍未回到起飞点。 而在进行植保作业时,应避免操作人员处在下风向,因为农业植保机产生的药物有可能产生漂移而随风飘散,导致操作人员吸入有毒药雾。

三种无人机平台的性能差别
在续航和载重方面,固定翼无人机可以以较低功率进行巡航,而旋翼类无人机螺旋桨产生的升力必须一直大于或等于机身的重量,所以固定翼无人机的飞行效率是最高的;而直升机与多旋翼相比,其螺旋桨直径更大,飞行效率更高。

拉力以及推重比
该电机在最大功率下所能产生的最大拉力,也直接反应了电机的功率水平。多旋翼飞行器要求其所有电机总推力必须大于机身自重一定比例,才能保障飞行器的飞行性能和飞行安全。这个比例我们称之为推重比,多旋翼的推重比都必须大于1,常见的在1.6-2.5,推重比反应了飞行器动力冗余情况,过低的推重比会降低多旋翼飞行器的飞行性能以及抗风性。在一定范围内其推重比越低,说明电机的工作强度越高,电机工作效率会不断下降。

锂电池充电器的基本参数
输入电压完整的锂电池平衡充电器其内部应至少含有两部分,一部分为交流转直流并降压电路,一路为平衡充电电路。对于完整的平衡充电器,其输入电压往往是市电交流220V,或者是110V交流。

锂电池的使用及维护
注意,锂聚合物电池性能总体相对“娇嫩”,必须严格按照正确的方法进行使用和维护,否则容易产生鼓包膨胀,导致电池不可逆的损伤。

锂聚合物电池的基本概念及参数
锂聚合物电池,英文LI—polymer,简称LIPO,是一种能量密度高、放电电流大的新型电池。同时,锂电池使用起来相对脆弱,对过充过放都极其敏感,在使用中应该熟练了解其使用性能。锂聚合物电池充电和放电过程,就是锂离子的嵌入和脱嵌过程,充电时锂离子由负极脱离嵌入正极,而在放电时,锂离子脱离正极嵌入负极。一旦锂聚合物电池放电导致电压过低或者充电电压过高,正负极的结构将会发生坍塌,导致锂聚合物电池受到不可逆的损伤。

什么是IMU惯性导航单元
包含加速度计、角速度计和气压高度计,是高精度地感应飞行器姿态、角度、速度和高度的传感器集合体,在飞行辅助功能中充当极其重要的角色。

什么是X型多旋翼
作为多旋翼中最基础也是最常见的气动布局,由于其优异的性能与简单的结构,深受众多多旋翼爱好者的喜爱。 X型气动布局是在飞行器前进方向的等分角度(左前-右前距机头方向均45°,机尾相同)放置相反方向电机以抵消电机转动时的反扭力。基于相同原理,x型的6旋翼、8旋翼具有x型4旋翼的特性的同时,还拥有比4旋翼更好的结构效率、承载重量以及冗余度等性质,深受航拍、影视行业用户青睐。

什么是磁罗盘
整个地球是拥有磁场的,类似常见的磁铁所形成的完整磁场。地球磁场,近似于把一个磁铁棒放到地球中心,N极大体上对着地理南极,S极大体对着地理北极。磁极与地理极不完全重合,存在磁偏角。当然,地球中心是高温状态并没有磁铁棒,而是通过外核的电子随地球自转的电流效应(近似于电生磁)产生磁场的。地球磁场属于电磁场,随地球公转而不随地球自转。

什么是电机的KV值
KV的概念是指无刷电机工作电压每提升1V无刷电机所增加的转速。以往的直流电机我们在介绍其性能时,会举例其在12V时该电机是多少转。无刷电机引入了KV的概念,能够使我们了解到该电机在不同的电压下所产生的空载转速(即没有负载)。KV与转速的公式为: KV值 X 电压 = 空载转速(每分钟) 例如,MG-1的电机其KV值为130KV,其工作最大电压为50.4V,可知其最大空载转速为: 130KV X 50.4V = 6552RPM 其中RPM的含义为:转/每分钟 但是要注意的是,实际上空载速度都会高于实际的负载转速,并且负载越大其实际转速会更低。 电机KV值的选择,取决于系统的工作电压,最终取决于电机的负载转速。例如同样一套飞行器,使用22.2V电压其电机KV为500KV,可知其空载转速为500*22.2=11000RPM;如果该飞行器使用11.1V电压,其电机KV值应为11000/11.1=1000KV。

什么是美国手及日本手
在了解多旋翼飞行器的操作方式之前,我们先对遥控器进行一下了解.遥控器的左右两侧各有一个摇杆,摇杆处在整个行程的中立位,可以向前后左右进行拨动,四个方向分别对应油门、偏航、俯仰、横滚。目前主要有两种操作方式比较常用,分别是美国手与日本手。美国手左边的是偏航与油门,右边是横滚与俯仰;日本手左边是偏航与俯仰,右边是横滚与油门。
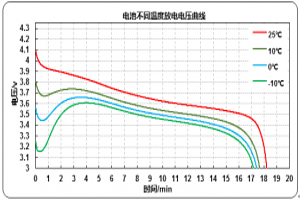
冬季电池注意事项
伴随冬季的来临,气温的下降,冬季的飞行需要格外的注意。由于近期有用户遇到各种冬季飞行的问题,如电压骤降、飞行动力不足,甚至更为严重的飞行器坠机情况。 锂电池工作机理: 飞行器以锂电池为动力,低温环境会严重降低锂电池的性能。当电池暴露低于15°C的环境下时,电池的化学物质活性显著降低,其内阻增大导致放电能力降低,电池放电时电压降加大。电压大幅下降(单电芯低于3V)会有两大风险:第一,飞行器动力系统最大推力不足以维持飞行;第二,电池会主动关机以避免电芯过放。这种特性是锂电池的通病,目前仍没有完美的解决方法。大家使用的手机,平板电脑等智能设备,在低温环境下也同样会关机。

航拍起源
航空摄影始于19世纪50年代,纳达尔是首位实现航拍的摄影师和气球驾驶者,于1858年在法国巴黎上空拍摄。当时从气球上用摄影机拍摄的城市照片,虽只有观赏价值,但却开创了从空中观察地球的历史。遗憾的是,纳达尔最早的航空摄影照片已无可寻踪了。1909年美国的莱特(W. Wright)第一次从飞机上对地面拍摄像片。莱特当时正在意大利忙于向意大利政府销售飞机,他当时不仅航拍了照片,还带了一个人上了飞机,俯拍了意大利西恩多西利地区军事基地的动态画面。此后,随着飞机和飞行技术,以及摄影机和感光材料等的飞速发展,航空摄影像片的质量有了很大提高,用途日益广泛。航拍的军事用途于第一次世界大战期间由飞行员得到了发展,新沙佩勒战役是其中著名的战役之一。
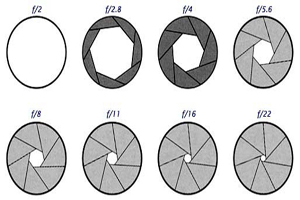
光圈
光圈的大小是相机镜头中控制光线的参数。说得直白一些,光圈的大小将决定光线穿过镜头的多少。光圈越大其透过镜头投影到数码相机CCD感光器上的光线也就越强,反之则越弱。它的大小也将直接影响到我们拍摄出的数码照片的成像质量。 光圈都用f值来表示,光圈F值=1/f=镜头的焦距/镜头光圈的直径。 完整的光圈值系列如下:1/1.0,1/1.4,1/2.0,1/2.8,1/4.0,1/5.6,1/8.0,1/11,1/16,1/22,1/32,1/44,1/64。

快门
快门的速度是拍摄照片时控制曝光时间长短的参数。为了让大家更容易理解,我们也可以把快门说成是让相机保持当前设定光圈大小的控制时间。 快门速度的表示方法,也是使用相应的数字来进行设定,比如1/30秒、1/60秒等,它们分别表示让当前设定的光圈孔径大小保持1/30秒、1/60秒的时间。1/30秒是1/60秒的两倍时间,而此时它们通过单位光圈孔径的光量也是成两倍的关系,反过来,1/30秒则是1/15秒的二分之一时间,通过单位光圈孔径的光量则将会缩减一半。使用不同的快门参数来保持单位光圈孔径的时间长短,也同样可以控制拍摄时的进光量,即曝光度。

感光度
感光度是胶片对光线的化学反应速度。数码相机的感光度是一种类似于胶卷感光度的一种指标。在数字语境下的感光度基于照相机光敏原件对光线的反应有多快。ISO200的胶卷的感光速度是ISO100的两倍,换句话说在其他条件相同的情况下,ISO200胶卷所需要的曝光时间是ISO100胶卷的一半。在数码相机内,通过调节等效感光度的大小,可以改变光源多少和图片亮度的数值。因此,感光度也成了间接控制图片亮度的数值。
选择另一个国家或地区,以获得适用于你所在位置的内容和课程选项。
United StatesEnglish
- 中国大陆简体中文
- 香港(繁体)繁体中文
- 澳门(繁体)繁体中文
- 台湾(繁体)繁体中文
- AustraliaEnglish
- BrazilEnglish
- ChileEnglish
- ColombiaEnglish
- CroatiaEnglish
- FranceEnglish
- GermanyEnglish
- GreeceEnglish
- IndonesiaEnglish
- ItalyEnglish
- KazakhstanEnglish
- MalaysiaEnglish
- MexicoEnglish
- Other Regions (EXC. Europe)English
- PakistanEnglish
- ParaguayEnglish
- PeruEnglish
- PhilippinesEnglish
- PortugalEnglish
- SpainEnglish
- ThailandEnglish
- TurkeyEnglish
- United Arab EmiratesEnglish
- United StatesEnglish
- VietnamEnglish
- 대한민국대한민국

国家/地区:中国大陆
- 中国大陆简体中文
- 香港(繁体)繁体中文
- 澳门(繁体)繁体中文
- 台湾(繁体)繁体中文
- AustraliaEnglish
- BrazilEnglish
- ChileEnglish
- ColombiaEnglish
- CroatiaEnglish
- FranceEnglish
- GermanyEnglish
- GreeceEnglish
- IndonesiaEnglish
- ItalyEnglish
- KazakhstanEnglish
- MalaysiaEnglish
- MexicoEnglish
- Other Regions (EXC. Europe)English
- PakistanEnglish
- ParaguayEnglish
- PeruEnglish
- PhilippinesEnglish
- PortugalEnglish
- SpainEnglish
- ThailandEnglish
- TurkeyEnglish
- United Arab EmiratesEnglish
- United StatesEnglish
- VietnamEnglish
- 대한민국대한민국
Knowledge